Developing an International Moth Testing Platform in a DVPP-Driven Real-Time Simulator
MSc Maritime Engineering Science – Yacht & High-Performance Craft
University of Southampton · 2024–2025
This project builds a full digital model of an International Moth dinghy
inside Simulator in Motion (SiM), a Dynamic Velocity Prediction
Program (DVPP) based sailing simulator. The platform is used to benchmark
against D3-VPP® targets and to study two flight-control approaches:
a mechanical wand and a heave PID controller.
Below you can explore the structure of the thesis, see selected plots,
watch simulator runs, and access the full report, poster and references.
The design of high-performance sailing craft has shifted from experience-driven iteration
to data-driven workflows based on 3D modelling, computational fluid dynamics (CFD)
and velocity prediction programmes (VPP). Hydro-foiling introduces inherently dynamic
behaviours that exceed the scope of steady VPPs, motivating dynamic-DVPPs and simulators
derived from them for design and training in America’s Cup (AC) and other high-performance
contexts.
This thesis implements an International Moth inside Simulator In Motion (SiM)—a
DVPP-based sailing simulator—aligning geometry, mass properties and aero/hydro models,
and establishing a workflow to compare predicted performance and controller behaviour
across configurations. Simulations were executed in this independent environment, while
D3-VPP® targets and the Exploder MD3 geometry supplied by D3 Applied Technologies, S.L. (D3)
defined the reference conditions and baseline configuration. The work first benchmarks SiM
against D3-VPP targets at two representative operating points (best-VMG upwind and downwind,
TWS = 14 kn), then exercises two flight-control approaches: (i) a mechanical wand (sensitivities
to gearing and wand length) and (ii) a heave PID (sensitivities to Kp, Ki and Kd), in flat
water and a simple regular sea state.
The simulator reproduces the VPP targets within ∼ 1% (speeds and VMGs), with attitudes close to
target and force balances coherent at both points, supporting its credibility for controller
studies in the tested envelope. For the wand, lower-response gearing attenuates wave-induced
oscillations without degrading mean ride height, and increased wand length primarily biases
the mean flight level while preserving a common steady wand angle. For the PID, a moderate
tuning (baseline near Kp ≈ 4, Ki ≈ 2–3, Kd ≈ 6) offers the best compromise between rise time
and damping; relative to the wand the PID shortens settling and improves disturbance rejection
in both flat and waves. Notably, electronic ride-height control is currently prohibited by the
International Moth Class Rules, restricting such benefits to non-official contexts.
Overall, the platform meets its objectives: it (i) matches VPP targets credibly at 14 kn
upwind/downwind, (ii) captures expected controller trends (gearing, wand length, PID gains),
and (iii) provides a practical, repeatable bench for flight-control development. Future work
should broaden the envelope (TWS/TWA and irregular seas), refine wand mechanism modelling,
and test crew dynamics and manoeuvres.
1. Introduction
Testing and developing components for foiling and high-performance boats is
expensive and risky. Wind and waves constantly change, which makes it hard
to compare configurations under controlled conditions. The International Moth,
one of the most demanding foiling dinghies, is an ideal test case to explore
how a DVPP-driven simulator can support design and control development.
The thesis defines three specific objectives:
O1 – Test platform: build a stable International Moth
test platform inside SiM that can reproduce D3-VPP performance
at key operating points using three PIDs (heel, TWA and heave).
O2 – Mechanical wand model: model the real wand-flap
flight-control system inside the simulator and study the sensitivity
to gearing and wand length using responses such as foil immersion,
wand angle and VMG.
O3 – Comparison: compare the PID-based and wand-based
flight-control systems, identifying benefits, drawbacks and use cases
for each approach.
2. Background & Literature Review
The background chapter starts with a short history of hydrofoils, from early
experiments in the 19th and early 20th century to modern high-speed craft.
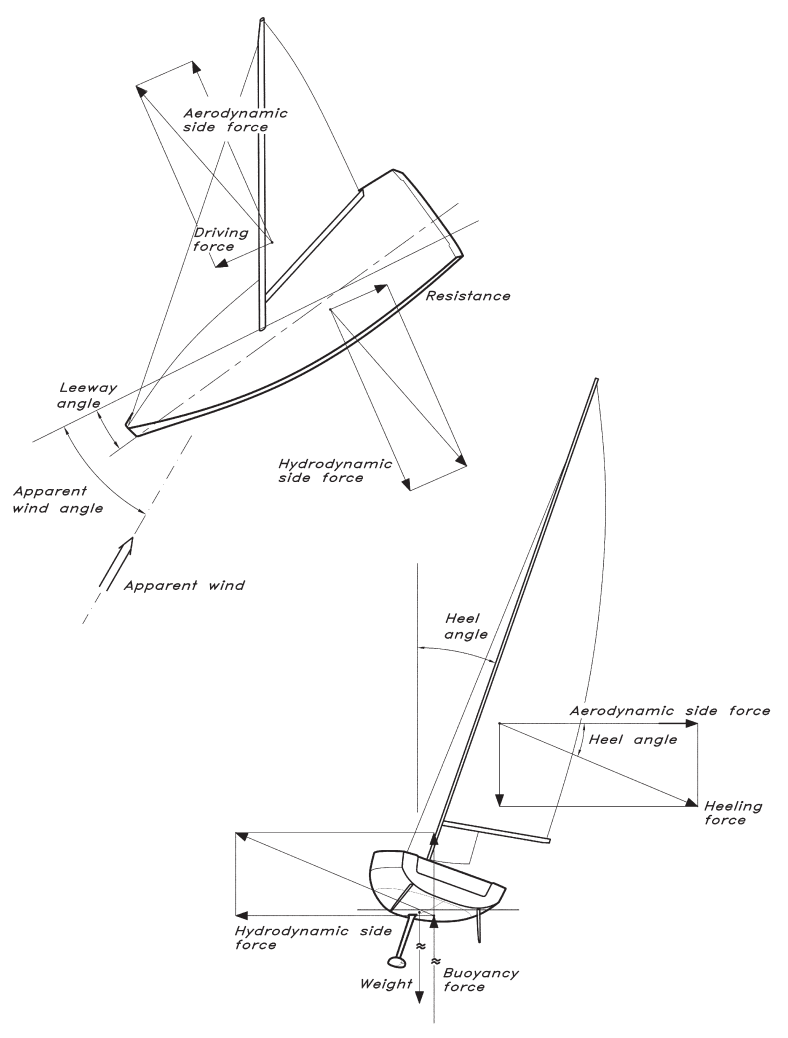
It then reviews the basic sailing mechanics needed to understand the Moth:
the wind triangle, force balances in the horizontal plane (XY) and vertical
plane (YZ), and the role of foils, rig and hull.
A specific section is devoted to the International Moth Class Rules
and to the mechanics of the flight-control system: bow-mounted wand,
linkage, gearing, ride-height offset and rudder-rake mechanism. Finally, the
chapter discusses classical Velocity Prediction Programs (VPP),
their limitations in dynamic foiling regimes, and how DVPP-based simulators
like SiM extend these tools into the time domain.
Conceptual view of the velocity triangle and main aero/hydro forces on a sailing yacht.
(Figure inspired by the material in the thesis.)
3. Methodology & Simulator Setup
The methodology chapter explains how the International Moth was translated
into digital form. The work starts from geometry and mass properties (based
on the Exploder MD3 configuration) and applies specialised physics models
for foils, hull, rig, rudder and windage.
Inside Simulator in Motion (SiM), the project configures:
SiM_Data – project folders, input files and data streams.
Yacht Manager – high-level configuration of the Moth model.
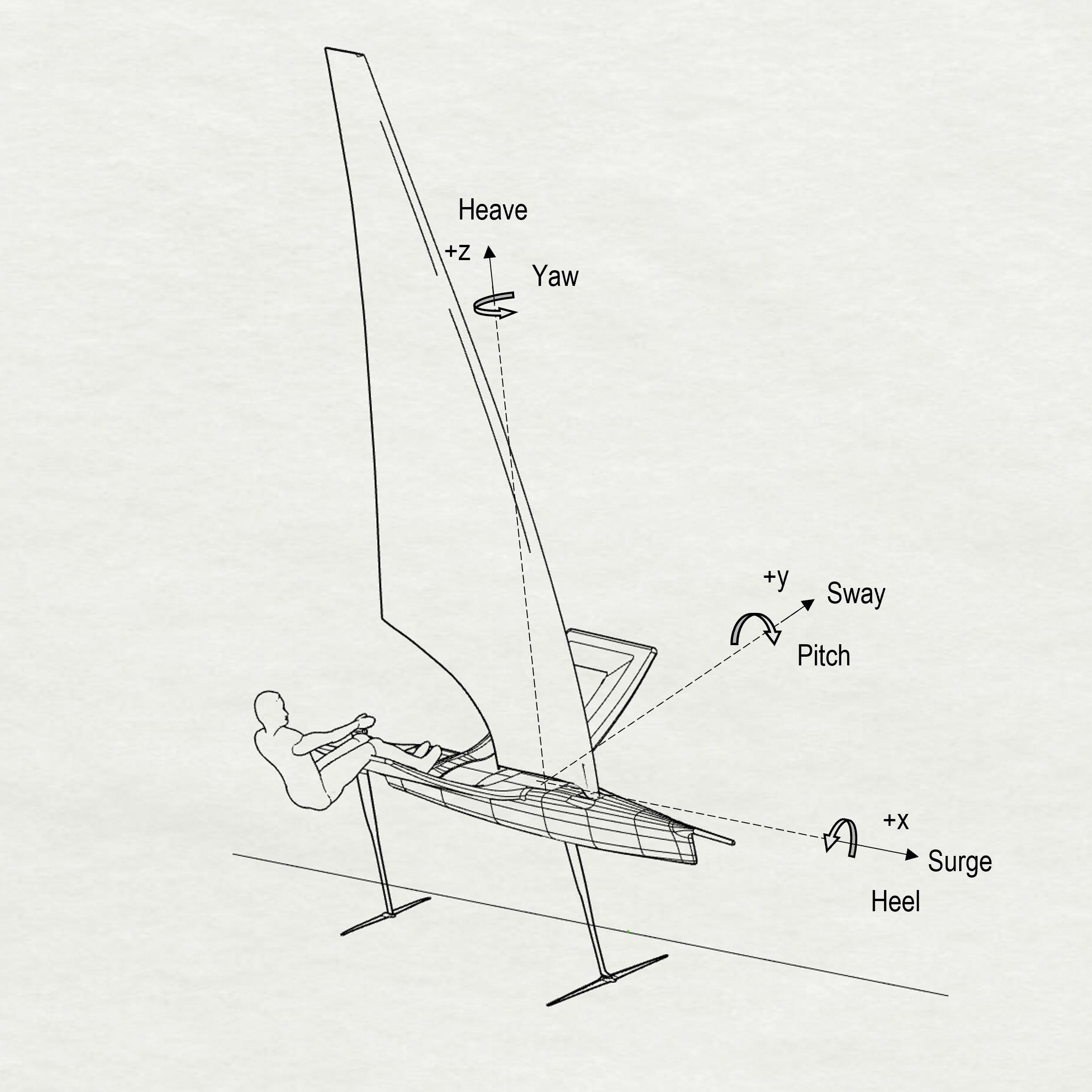
Yacht Model – detailed physics models and 6-DOF dynamics.
INPUTS/MOTH – custom files for appendages, rig and controllers.
A step-by-step workflow links D3-VPP polars and VMG targets with SiM runs,
making sure that both tools use consistent geometry, mass and operating
conditions before any controller study is carried out.
International Moth geometry and forces running inside the SiM interface
(illustrative figure based on the project poster).
4. Benchmarking against D3-VPP
Before using the simulator as a flight-control test bench, the model is
benchmarked against D3-VPP at two representative conditions:
best-VMG upwind and best-VMG downwind at TWS = 14 kn.
For each operating point, the study compares:
Boat speed and VMG.
Heel and pitch attitudes.
Force and moment balances.
The SiM outputs match D3-VPP targets within around 1% in speed and VMG,
and reproduce coherent attitudes and load distributions. This gives
confidence that the simulator is a credible environment for controller
studies within the tested envelope.
5. Flight-Control System Studies
Once the base Moth model is validated, the project focuses on the
flight-control system. Two families of controllers are studied:
Mechanical wand system: a bow-mounted wand sensing
ride height, linked to the main-foil flap through rods and bell cranks,
with adjustable gearing, length and ride-height offset.
Heave PID controller: an electronic proportional–integral–
derivative controller acting on flap angle based on heave feedback.
5.1 Sensitivity Studies
Several simulation campaigns explore how control parameters affect flight:
Gearing Sensitivity Study: how different wand gearings
change foil immersion, ride-height stability and upwind VMG in flat
and wave conditions.
Wand Length Sensitivity Study: how changing wand length
biases the mean flight level and interacts with ride-height offset.
Heave PID Controller Study: tuning Kp,
Ki and Kd to balance rise time, overshoot
and disturbance rejection.
Comparison Study: direct comparison between tuned
wand configurations and a tuned PID in both flat water and regular waves.
Simulator run – Downwind
International Moth sailing downwind inside SiM at the best-VMG
operating point.
Simulator run – Upwind in waves
Upwind sailing with a regular head-sea wave, showing the interaction
between sea state and flight-control settings.
On-water reference – Real Moth sailing
Short reference of a real International Moth foiling, used to keep the
simulator behaviour connected to on-water experience.
5.2 Main findings from control comparisons
The PID offers shorter settling time and better disturbance
rejection, especially in waves, leading to more stable ride height and
trim in the tested conditions.
The wand system is mechanically simple and robust, and
its behaviour is mainly driven by gearing (effective loop gain) and wand
length (mean flight height).
Electronic ride-height control is currently not allowed by the
International Moth Class Rules, so the PID pathway is relevant mainly
for training, experimental work and potential future rule changes.
6. Conclusions & Future Work
The project shows that a DVPP-based simulator such as SiM can host a
credible International Moth test platform. Within the tested envelope,
the model reproduces D3-VPP performance, captures expected controller trends
and provides a repeatable environment for flight-control development.
Limitations mainly concern the restricted operating range (TWS, TWA and
sea states), simplified aero models and the absence of crew dynamics or
manoeuvres. Future work should:
Broaden the matrix of TWS/TWA and sea conditions (including irregular seas).
Develop more advanced PID tuning, with anti-windup and fail-safe interfaces.
Incorporate crew dynamics, manoeuvres and validation against on-water data.
Within these limits, the SiM-Moth platform justifies its role as a development
tool and opens the door to more systematic studies of foiling dinghy flight
control and performance.
Additional material
Full thesis
Complete MSc report in PDF format, including all chapters, figures,
tables and appendices.
I. Castañeda Sabadell, “Design of a physical and interactive real-time simulator
based on a dynamic vpp as a support tool for sailing yacht design and operation,”
Ph.D. dissertation, ETSI Navales, Universidad Politécnica de Madrid, 2018.
J. Ozanne, Team principal at simulator in motion, simulator and a.i. team lead at
alinghi red bull racing, https://www.linkedin.com/in/josephozanne/, Accessed:
2025-09-02, 2025.
International Moth Class Association, International moth class rules, Dec. 2024.
[Online]. Available: https://www.sailing.org/classes/moth/#Documents.
International Hydrofoil Society, Aeromarine origins — early work by thomas moy
(1861), Online article, Accessed 7 Sep 2025, 2018. [Online]. Available:
https://www.foils.org/wp-content/uploads/2018/01/AeromarineOrigins.pdf.
International Hydrofoil Society, Ships that fly — forlanini’s hydrofoil on lake maggiore
(1906), Online booklet, Accessed 7 Sep 2025, 2018. [Online]. Available:
https://www.foils.org/wp-content/uploads/2018/01/ShipsThatFly.pdf.
Alexander Graham Bell Foundation, Hydrofoil history: Bell and baldwin’s hd–4, Web
page, Accessed 7 Sep 2025, 2024. [Online]. Available:
https://agbfoundation.ca/hydrofoil/.
The Canadian Encyclopedia, Hydrofoil (historical overview and hd–4 record), Web
page, Accessed 7 Sep 2025, 2023. [Online]. Available:
https://thecanadianencyclopedia.ca/en/article/hydrofoil.
T. M. Buermann, “An appraisal of hydrofoil supported craft,” SNAME Transactions,
vol. 61, 1953. [Online]. Available:
https://www.foils.org/wp-content/uploads/2018/01/SNAMEtransactionsVol61-1953.pdf.
E. D’Amato et al., “Hydrodynamic design of fixed hydrofoils for planing craft,”
Journal of Marine Science and Engineering, vol. 11, no. 2, p. 246, 2023.
doi: 10.3390/jmse11020246. [Online]. Available:
https://www.mdpi.com/2077-1312/11/2/246.
L. Larsson, R. E. Eliasson, and M. Orych, Principles of Yacht Design, 5th. London:
Adlard Coles / Bloomsbury, 2022, isbn: 9781472981929.
J. I. R. Blake, Lecture notes on sess3027 yacht & high performance craft,
Lecture notes, 2021.
F. Fossati, Aero-hydrodynamics and the Performance of Sailing Yachts: The Science
Behind Sailing Yachts and Their Design. London: A & C Black Publishers Ltd,
2009, p. 352, isbn: 9781408113387.
B. Beaver and J. Zseleczky, “Full scale measurements on a hydrofoil international
moth,” in SNAME Chesapeake Sailing Yacht Symposium, 2009, D021S002R006.
F. Eggert, “Flight dynamics and stability of a hydrofoiling international moth with
a dynamic velocity prediction program (dvpp),” M.S. thesis, Technische Universität
Berlin, 2018.
J. E. Kerwin, “A velocity prediction program for ocean racing yachts,” Rep 78-11
MIT, Jul. 1978.
A. R. Claughton, J. F. Wellicome, and R. A. Shenoi, Sailing Yacht Design: Theory.
Harlow: Addison Wesley Longman, 1998.
A. R. Claughton, “Developments in the ims vpp formulations,” in Proceedings of
the 14th Chesapeake Sailing Yacht Symposium, SNAME, Annapolis, MD, 1999.
Orc vpp documentation, Technical description of the ORC Velocity Prediction Program,
Offshore Racing Congress, 2020. [Online]. Available: https://www.orc.org/rules/.
P. Kerdraon, B. Horel, P. Bot, A. Letourneur, and D. Le Touzé, “Development
of a 6-dof dynamic velocity prediction program for offshore racing yachts,”
Ocean Engineering, vol. 212, p. 107668, 2020.
doi: 10.1016/j.oceaneng.2020.107668.
D. P. J. Hull, “Speed sailing design & velocity prediction program,” BEng thesis,
Australian Maritime College, University of Tasmania, 2014.
N. Patterson and J. Binns, “Development of a six degree of freedom velocity prediction
program for the foiling america’s cup vessels,” Journal of Sailing Technology,
vol. 7, no. 1, pp. 120–151, 2022.
A. Persson, “Predicting yacht performance in waves using a cfd velocity prediction
program,” Ph.D. dissertation, Chalmers University of Technology, 2025.
R. Tannenberg, S. R. Turnock, K. Hochkirch, and S. W. Boyd, “Vpp driven parametric
design of ac75 hydrofoils,” Journal of Sailing Technology, vol. 8, no. 1,
pp. 161–182, 2023.
L. Sampedro Moix, “Preliminary design of a racing dinghy: F18 catamaran,” B.S.
thesis, EPEF, Universidade da Coruña, 2023.
S. Day, L. Letizia, and A. Stuart, “Vpp vs ppp: Challenges in the time-domain
prediction of sailing yacht performance,” in Proceedings of the High Performance
Yacht Design Conference (HPYD 1), Conference dates: 4–6 December 2002, Auckland,
New Zealand: Royal Institution of Naval Architects (RINA), 2002.
doi: 10.3940/rina.ya.2002.07.
D. H. Harris, “Time domain simulation of a yacht sailing upwind in waves,” in
Proceedings of the 17th Chesapeake Sailing Yacht Symposium, Annapolis, MD, USA:
SNAME, Chesapeake Section, 2005, pp. 13–32.
H. Hansen and et al., “Maneuver simulation and optimization for ac50 class,” in
Journal of Sailing Technology, 2019. [Online]. Available:
https://higherlogicdownload.s3.amazonaws.com/SNAME/1516f098-2760-4bff-86fa-9ca63a85f102/UploadedImages/2019%20-%2007%20__Hansen__et__al__Maneuver__Simulation__and__Optimisation__for__AC50_Class.pdf.
M. F. Melis, “Velocity prediction program for a hydrofoiling lake racer,” Journal
of Sailing Technology, 2022. [Online]. Available:
https://www.foils.org/wp-content/uploads/2022/08/Melis-Submission-Hamburg-University-Honorable-Mention.pdf.
K. Hochkirch, Fs-equilibrium user manual, Citado por Tannenberg (2023) como
manual de referencia de FS-Equilibrium, DNV GL Maritime, 2018.
M. Brito, “Use of gomboc to predict the performance of a hydro-foiled moth,”
Yacht Research Unit, The University of Auckland, Tech. Rep., 2019.
Simulator in Motion. “Demonstration video (homepage).” Frame captured by the
author for academic illustration. (), [Online]. Available:
https://www.simulatorinmotion.com/ (visited on 09/07/2025).