Desarrollo de una plataforma de ensayo para el International Moth en un simulador en tiempo
real basado en DVPP
MSc Maritime Engineering Science – Yacht & High-Performance Craft
University of Southampton · 2024–2025
Este proyecto construye un modelo digital completo de un dinghy International Moth
dentro de Simulator in Motion (SiM), un simulador de vela basado
en un Dynamic Velocity Prediction Program (DVPP). La plataforma se utiliza para
contrastar resultados con D3-VPP® y estudiar dos enfoques de control de vuelo:
un sistema mecánico de varilla (wand) y un controlador PID de asiento
(heave PID).
A continuación puedes explorar la estructura de la memoria, ver gráficas
seleccionadas, reproducir simulaciones y acceder al informe completo,
póster y referencias.
Estudios de sensibilidad para el engranaje de la varilla, su longitud y los
parámetros Kp, Ki, Kd del PID, incluyendo
comparaciones entre control mecánico y electrónico.
The design of high-performance sailing craft has shifted from experience-driven iteration
to data-driven workflows based on 3D modelling, computational fluid dynamics (CFD)
and velocity prediction programmes (VPP). Hydro-foiling introduces inherently dynamic
behaviours that exceed the scope of steady VPPs, motivating dynamic-DVPPs and simulators
derived from them for design and training in America’s Cup (AC) and other high-performance
contexts.
This thesis implements an International Moth inside Simulator In Motion (SiM)—a
DVPP-based sailing simulator—aligning geometry, mass properties and aero/hydro models,
and establishing a workflow to compare predicted performance and controller behaviour
across configurations. Simulations were executed in this independent environment, while
D3-VPP® targets and the Exploder MD3 geometry supplied by D3 Applied Technologies, S.L. (D3)
defined the reference conditions and baseline configuration. The work first benchmarks SiM
against D3-VPP targets at two representative operating points (best-VMG upwind and downwind,
TWS = 14 kn), then exercises two flight-control approaches: (i) a mechanical wand (sensitivities
to gearing and wand length) and (ii) a heave PID (sensitivities to Kp, Ki and Kd), in flat
water and a simple regular sea state.
The simulator reproduces the VPP targets within ∼ 1% (speeds and VMGs), with attitudes close to
target and force balances coherent at both points, supporting its credibility for controller
studies in the tested envelope. For the wand, lower-response gearing attenuates wave-induced
oscillations without degrading mean ride height, and increased wand length primarily biases
the mean flight level while preserving a common steady wand angle. For the PID, a moderate
tuning (baseline near Kp ≈ 4, Ki ≈ 2–3, Kd ≈ 6) offers the best compromise between rise time
and damping; relative to the wand the PID shortens settling and improves disturbance rejection
in both flat and waves. Notably, electronic ride-height control is currently prohibited by the
International Moth Class Rules, restricting such benefits to non-official contexts.
Overall, the platform meets its objectives: it (i) matches VPP targets credibly at 14 kn
upwind/downwind, (ii) captures expected controller trends (gearing, wand length, PID gains),
and (iii) provides a practical, repeatable bench for flight-control development. Future work
should broaden the envelope (TWS/TWA and irregular seas), refine wand mechanism modelling,
and test crew dynamics and manoeuvres.
1. Introducción
Probar y desarrollar nuevos componentes para barcos foiling y de altas prestaciones
es caro y arriesgado. Las condiciones de viento y mar cambian constantemente, lo que
dificulta comparar de forma consistente distintas configuraciones. El International Moth,
uno de los dinghies foiling más exigentes, es un caso de estudio ideal para explorar
cómo un simulador basado en DVPP puede apoyar el diseño y el desarrollo de sistemas de control.
En la memoria se formulan tres objetivos específicos:
O1 – Plataforma de ensayo: construir una plataforma
de ensayo estable dentro de SiM que reproduzca el rendimiento previsto
por D3-VPP en puntos de operación clave utilizando tres PID (escora,
TWA y asiento).
O2 – Modelo mecánico de varilla: implementar en el
simulador el sistema de control de vuelo real basado en varilla y flap,
y estudiar su sensibilidad al engranaje y a la longitud de la varilla,
usando como respuestas la inmersión del foil, el ángulo de la varilla y la VMG.
O3 – Comparación: comparar el sistema controlado por PID
con el sistema controlado por varilla, identificando ventajas, inconvenientes
y contextos de uso de cada uno.
2. Contexto y revisión bibliográfica
El capítulo de contexto resume la evolución de los hidroalas, desde las
primeras pruebas experimentales hasta las embarcaciones actuales de alta
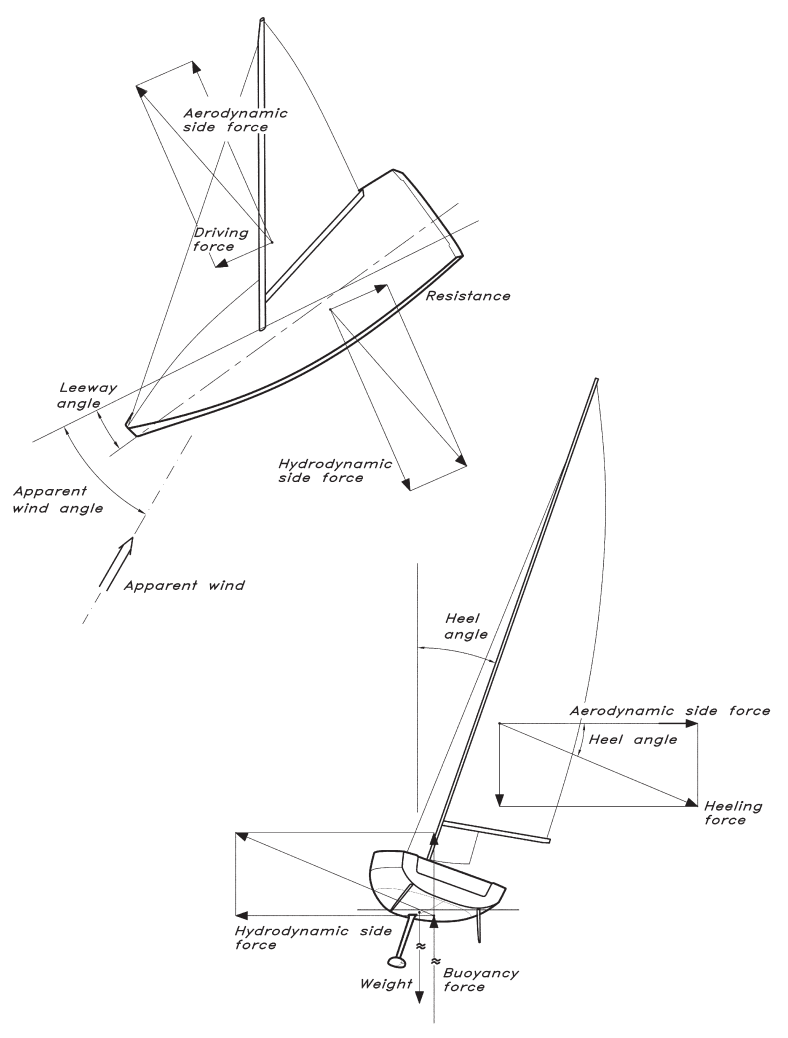
velocidad. A partir de ahí introduce la mecánica básica de la navegación
a vela: triángulo de vientos, equilibrio de fuerzas en el plano horizontal
y vertical, y el papel de los foils, el aparejo y el casco.
Se dedica una sección específica a las reglas de clase del Moth y al
funcionamiento del sistema de control de vuelo: varilla de proa,
sistema de bieletas, engranajes, ajuste de altura de vuelo y mecanismo de
rudder rake. El capítulo termina analizando los VPP clásicos,
sus limitaciones en regímenes foiling fuertemente dinámicos y cómo los
simuladores basados en DVPP, como SiM, amplían estas herramientas al
dominio del tiempo.
Esquema conceptual del triángulo de velocidades y de las principales fuerzas
aero/hidrodinámicas sobre un velero (inspirado en el material de la memoria).
3. Metodología y configuración del simulador
La metodología describe cómo se traduce el International Moth al entorno digital.
El trabajo parte de la geometría y las propiedades de masa (basadas en la
configuración Exploder MD3) y aplica modelos de física específicos para foils,
casco, aparejo, timón y superficies expuestas al viento.
Dentro de Simulator in Motion (SiM) se configuran:
SiM_Data – estructura de carpetas, ficheros de entrada y datos.
Yacht Manager – configuración general del modelo del Moth.
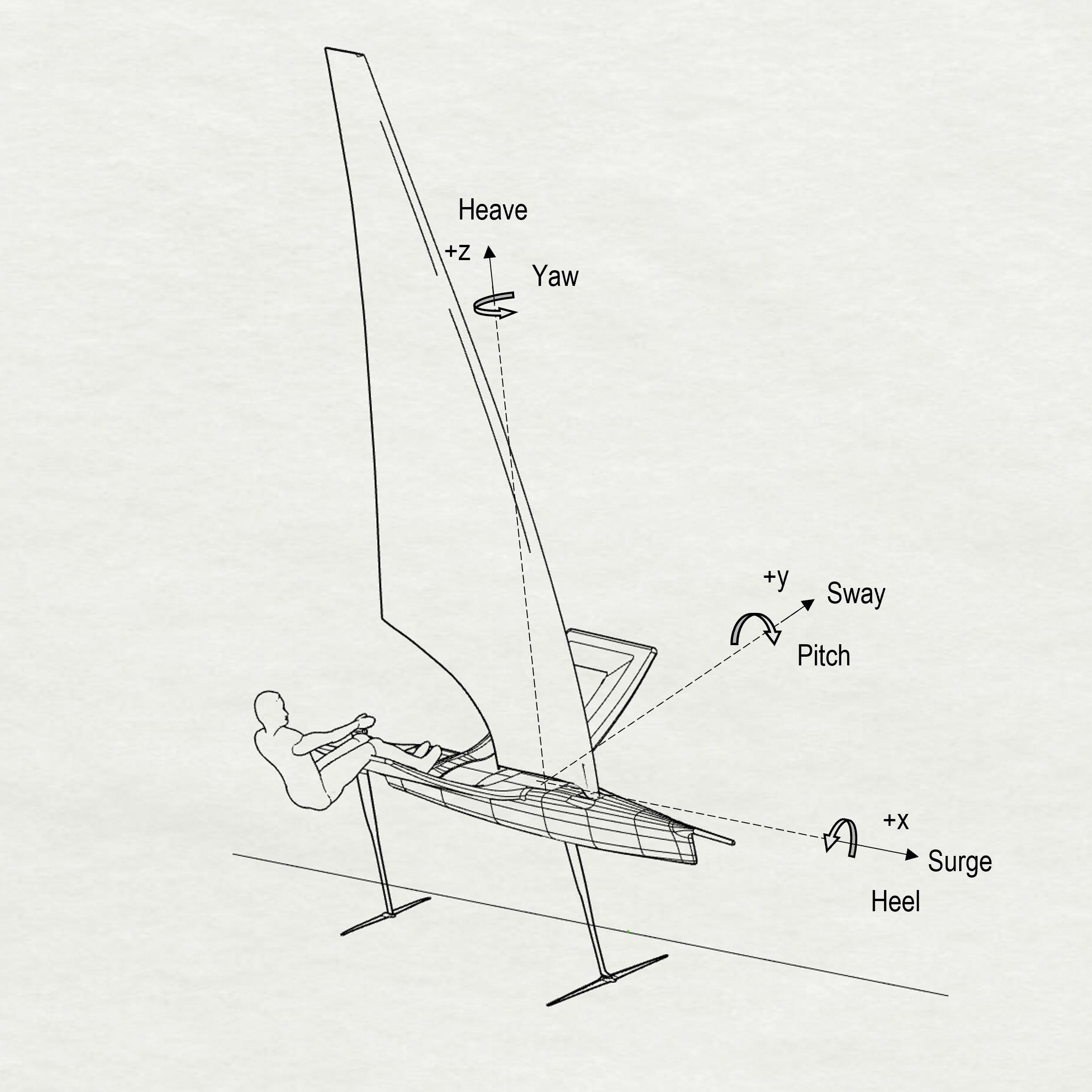
Yacht Model – modelos de física detallados y dinámica 6-GDL.
INPUTS/MOTH – archivos específicos para apéndices, aparejo y controladores.
Se define un flujo de trabajo que conecta los polares y objetivos de VMG de
D3-VPP con las simulaciones en SiM, asegurando que ambos utilizan geometría,
masas y condiciones de operación coherentes antes de iniciar los estudios de control.
Vista esquemática del International Moth dentro de la interfaz de SiM
(figura basada en el póster del proyecto).
4. Comparación con D3-VPP
Antes de utilizar el simulador como banco de pruebas de control de vuelo,
se valida el modelo comparando los resultados con D3-VPP en dos
condiciones representativas: mejor VMG de ceñida y mejor VMG de popa
a TWS = 14 nudos.
Para cada punto de operación se comparan:
Velocidad del barco y VMG.
Actitudes de escora y cabeceo.
Equilibrio de fuerzas y momentos.
Los resultados de SiM reproducen los objetivos de D3-VPP con un error en
velocidad y VMG del orden del 1%, y muestran actitudes y distribuciones
de carga coherentes. Esto aporta confianza en el simulador como entorno
de estudio dentro del rango de operación analizado.
5. Estudios de control de vuelo
Una vez validado el modelo base del Moth, la atención se centra en el
sistema de control de vuelo. Se analizan dos familias de controladores:
Sistema mecánico de varilla: varilla de proa que mide la
altura de vuelo y actúa sobre el flap del foil principal mediante un
sistema de bieletas y palancas, con engranaje, longitud y altura de
vuelo ajustables.
Controlador PID de asiento: controlador proporcional–integral–
derivativo que actúa sobre el ángulo de flap en función de la señal de heave.
5.1 Estudios de sensibilidad
Se llevan a cabo varias campañas de simulación para estudiar cómo afectan
los parámetros de control al vuelo:
Estudio de sensibilidad al engranaje: efecto de distintos
engranajes de la varilla sobre la inmersión del foil, la estabilidad de
la altura de vuelo y la VMG en ceñida, tanto en agua plana como con ola regular.
Estudio de longitud de varilla: cómo la longitud de la varilla
desplaza la altura de vuelo media e interacciona con el ajuste de offset.
Estudio del PID de heave: ajuste de Kp, Ki
y Kd para equilibrar tiempo de establecimiento, sobreoscilación
y rechazo a perturbaciones.
Estudio comparativo: comparación directa entre configuraciones
optimizadas de varilla y un PID ajustado en agua plana y con ola regular.
Simulación – Popa
International Moth navegando en popa dentro de SiM, en el punto de
mejor VMG.
Simulación – Ceñida con ola
Navegación en ceñida con ola de proa, mostrando la interacción entre
mar y parámetros de control de vuelo.
Referencia real – Moth en el agua
Clip corto de un International Moth foileando en el agua, utilizado
como referencia cualitativa para el comportamiento del simulador.
5.2 Principales conclusiones sobre el control
El PID ofrece menores tiempos de establecimiento y mejor
rechazo a perturbaciones, especialmente en ola, dando una altura de
vuelo y trimado más estables en el rango analizado.
El sistema de varilla es mecánicamente simple y robusto, y
su comportamiento viene marcado por el engranaje (ganancia efectiva
del lazo) y la longitud de la varilla (altura de vuelo media).
El control electrónico de altura de vuelo está actualmente
prohibido por las reglas de clase del International Moth,
por lo que el enfoque PID es relevante sobre todo para entrenamiento,
pruebas experimentales y posibles futuras evoluciones del reglamento.
6. Conclusiones y trabajo futuro
El proyecto demuestra que un simulador basado en DVPP como SiM puede alojar
una plataforma de ensayo creíble para el International Moth. Dentro del
rango de operación estudiado, el modelo reproduce el rendimiento de D3-VPP,
recoge las tendencias esperadas de los sistemas de control y proporciona un
entorno repetible para el desarrollo del control de vuelo.
Las principales limitaciones se relacionan con el rango de operación analizado
(TWS, TWA y estados de mar), la simplificación de algunos modelos aerodinámicos
y la ausencia de dinámica de tripulación o maniobras. El trabajo futuro debería:
Ampliar la matriz de TWS/TWA y de estados de mar (incluyendo mar irregular).
Refinar el modelo mecánico de la varilla (muelles, amortiguamiento, fricción, etc.).
Desarrollar estrategias de ajuste del PID más avanzadas, con anti-windup y
herramientas seguras de ajuste en el agua.
Incorporar dinámica de tripulación, maniobras y validación sistemática con datos reales.
Con estas reservas, la plataforma SiM–Moth se justifica como herramienta de
desarrollo y abre la puerta a estudios más sistemáticos sobre control de vuelo
y rendimiento en dinghies foiling.
Material adicional
Memoria completa
Informe completo del MSc en formato PDF, con todos los capítulos,
figuras, tablas y anexos.
I. Castañeda Sabadell, “Design of a physical and interactive real-time simulator
based on a dynamic vpp as a support tool for sailing yacht design and operation,”
Ph.D. dissertation, ETSI Navales, Universidad Politécnica de Madrid, 2018.
J. Ozanne, Team principal at simulator in motion, simulator and a.i. team lead at
alinghi red bull racing, https://www.linkedin.com/in/josephozanne/, Accessed:
2025-09-02, 2025.
International Moth Class Association, International moth class rules, Dec. 2024.
[Online]. Available: https://www.sailing.org/classes/moth/#Documents.
International Hydrofoil Society, Aeromarine origins — early work by thomas moy
(1861), Online article, Accessed 7 Sep 2025, 2018. [Online]. Available:
https://www.foils.org/wp-content/uploads/2018/01/AeromarineOrigins.pdf.
International Hydrofoil Society, Ships that fly — forlanini’s hydrofoil on lake maggiore
(1906), Online booklet, Accessed 7 Sep 2025, 2018. [Online]. Available:
https://www.foils.org/wp-content/uploads/2018/01/ShipsThatFly.pdf.
Alexander Graham Bell Foundation, Hydrofoil history: Bell and baldwin’s hd–4, Web
page, Accessed 7 Sep 2025, 2024. [Online]. Available:
https://agbfoundation.ca/hydrofoil/.
The Canadian Encyclopedia, Hydrofoil (historical overview and hd–4 record), Web
page, Accessed 7 Sep 2025, 2023. [Online]. Available:
https://thecanadianencyclopedia.ca/en/article/hydrofoil.
T. M. Buermann, “An appraisal of hydrofoil supported craft,” SNAME Transactions,
vol. 61, 1953. [Online]. Available:
https://www.foils.org/wp-content/uploads/2018/01/SNAMEtransactionsVol61-1953.pdf.
E. D’Amato et al., “Hydrodynamic design of fixed hydrofoils for planing craft,”
Journal of Marine Science and Engineering, vol. 11, no. 2, p. 246, 2023.
doi: 10.3390/jmse11020246. [Online]. Available:
https://www.mdpi.com/2077-1312/11/2/246.
L. Larsson, R. E. Eliasson, and M. Orych, Principles of Yacht Design, 5th. London:
Adlard Coles / Bloomsbury, 2022, isbn: 9781472981929.
J. I. R. Blake, Lecture notes on sess3027 yacht & high performance craft,
Lecture notes, 2021.
F. Fossati, Aero-hydrodynamics and the Performance of Sailing Yachts: The Science
Behind Sailing Yachts and Their Design. London: A & C Black Publishers Ltd,
2009, p. 352, isbn: 9781408113387.
B. Beaver and J. Zseleczky, “Full scale measurements on a hydrofoil international
moth,” in SNAME Chesapeake Sailing Yacht Symposium, 2009, D021S002R006.
F. Eggert, “Flight dynamics and stability of a hydrofoiling international moth with
a dynamic velocity prediction program (dvpp),” M.S. thesis, Technische Universität
Berlin, 2018.
J. E. Kerwin, “A velocity prediction program for ocean racing yachts,” Rep 78-11
MIT, Jul. 1978.
A. R. Claughton, J. F. Wellicome, and R. A. Shenoi, Sailing Yacht Design: Theory.
Harlow: Addison Wesley Longman, 1998.
A. R. Claughton, “Developments in the ims vpp formulations,” in Proceedings of
the 14th Chesapeake Sailing Yacht Symposium, SNAME, Annapolis, MD, 1999.
Orc vpp documentation, Technical description of the ORC Velocity Prediction Program,
Offshore Racing Congress, 2020. [Online]. Available: https://www.orc.org/rules/.
P. Kerdraon, B. Horel, P. Bot, A. Letourneur, and D. Le Touzé, “Development
of a 6-dof dynamic velocity prediction program for offshore racing yachts,”
Ocean Engineering, vol. 212, p. 107668, 2020.
doi: 10.1016/j.oceaneng.2020.107668.
D. P. J. Hull, “Speed sailing design & velocity prediction program,” BEng thesis,
Australian Maritime College, University of Tasmania, 2014.
N. Patterson and J. Binns, “Development of a six degree of freedom velocity prediction
program for the foiling america’s cup vessels,” Journal of Sailing Technology,
vol. 7, no. 1, pp. 120–151, 2022.
A. Persson, “Predicting yacht performance in waves using a cfd velocity prediction
program,” Ph.D. dissertation, Chalmers University of Technology, 2025.
R. Tannenberg, S. R. Turnock, K. Hochkirch, and S. W. Boyd, “Vpp driven parametric
design of ac75 hydrofoils,” Journal of Sailing Technology, vol. 8, no. 1,
pp. 161–182, 2023.
L. Sampedro Moix, “Preliminary design of a racing dinghy: F18 catamaran,” B.S.
thesis, EPEF, Universidade da Coruña, 2023.
S. Day, L. Letizia, and A. Stuart, “Vpp vs ppp: Challenges in the time-domain
prediction of sailing yacht performance,” in Proceedings of the High Performance
Yacht Design Conference (HPYD 1), Conference dates: 4–6 December 2002, Auckland,
New Zealand: Royal Institution of Naval Architects (RINA), 2002.
doi: 10.3940/rina.ya.2002.07.
D. H. Harris, “Time domain simulation of a yacht sailing upwind in waves,” in
Proceedings of the 17th Chesapeake Sailing Yacht Symposium, Annapolis, MD, USA:
SNAME, Chesapeake Section, 2005, pp. 13–32.
H. Hansen and et al., “Maneuver simulation and optimization for ac50 class,” in
Journal of Sailing Technology, 2019. [Online]. Available:
https://higherlogicdownload.s3.amazonaws.com/SNAME/1516f098-2760-4bff-86fa-9ca63a85f102/UploadedImages/2019%20-%2007%20__Hansen__et__al__Maneuver__Simulation__and__Optimisation__for__AC50_Class.pdf.
M. F. Melis, “Velocity prediction program for a hydrofoiling lake racer,” Journal
of Sailing Technology, 2022. [Online]. Available:
https://www.foils.org/wp-content/uploads/2022/08/Melis-Submission-Hamburg-University-Honorable-Mention.pdf.
K. Hochkirch, Fs-equilibrium user manual, Citado por Tannenberg (2023) como
manual de referencia de FS-Equilibrium, DNV GL Maritime, 2018.
M. Brito, “Use of gomboc to predict the performance of a hydro-foiled moth,”
Yacht Research Unit, The University of Auckland, Tech. Rep., 2019.
Simulator in Motion. “Demonstration video (homepage).” Frame captured by the
author for academic illustration. (), [Online]. Available:
https://www.simulatorinmotion.com/ (visited on 09/07/2025).